У меня есть объемный объем ультразвуковой объемной ультразвуковой объем, содержащий один сосуд, и я пытаюсь восстановить поверхность сосуда. 3D-объем создается из стека 2D-изображений/B-сканов, а контур сосуда в каждом B-сканировании сегментирован; то есть я имею эллипс, представляющий контур сосуда в каждом B-сканировании в объеме. Я попытался восстановить контур судна, следуя примеру VTK «GenerateModelsFromLabels.cxx» (http://www.vtk.org/Wiki/VTK/Examples/Cxx/Medical/GenerateModelsFromLabels). Однако результат - это не гладкая поверхность от одного кадра к другому, как я бы надеялся на это. Он прерывистый и нерегулярный, и поверхность не соединяет контуры сосуда между двумя соседними рамками в объеме, если смещение между эллипсами велико. В моем подходе я в основном использовал DiscreteMarchingCubes -> WindowedSincPolyDataFilter -> GeometryFilter.3D реконструкция поверхности сосуда
Я играл с полосой пропускания, smoothingIterations и featureAngle параметров, и я был в состоянии получить лучший следующий результат:

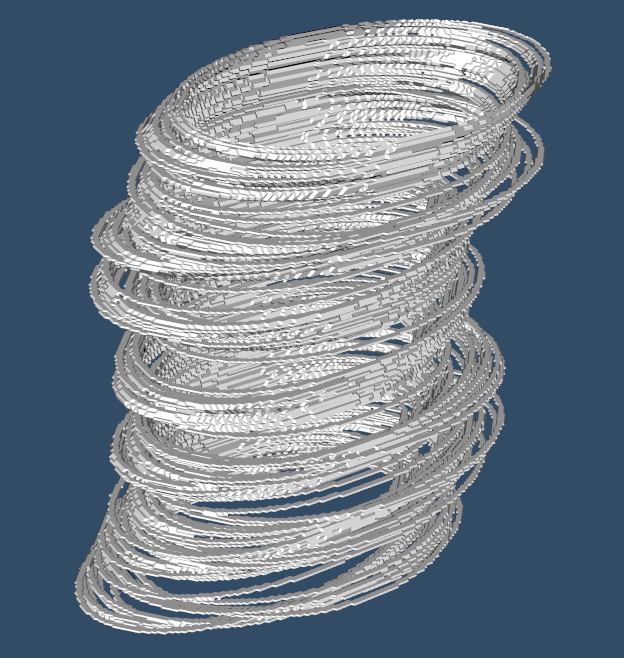

Как вы можете видеть , это не гладкая непрерывная поверхность с множеством неинтерполированных «дыр» между соседними кадрами, но все в порядке. Может ли это быть лучше? Я также попытался использовать триангуляцию 3D Delaunay, но это только дало мне выпуклый корпус, который не был результатом, который я ожидал. Я хотел бы знать, есть ли лучший подход к восстановлению поверхности, которая следует за контуром сосуда от одного B-сканирования до следующего в объеме?
Минимальный рабочий пример приведен ниже:
vtkSmartPointer<vtkImageData> vesselVolume =
vtkSmartPointer<vtkImageData>::New();
int totalImages = 210;
for (int z = 0; z < totalImages; z++)
{
std::string strFile = "E:/datasets/vasc/rendering/contour/" + std::to_string(z + 1) + ".png";
cv::Mat im = cv::imread(strFile, CV_LOAD_IMAGE_GRAYSCALE);
if (z == 0)
{
vesselVolume->SetExtent(0, im.cols, 0, im.rows, 0, totalImages - 1);
vesselVolume->SetSpacing(1, 1, 1);
vesselVolume->SetOrigin(0, 0, 0);
vesselVolume->AllocateScalars(VTK_UNSIGNED_CHAR, 0);
}
std::vector<cv::Point2i> locations; // output, locations of non-zero pixels
cv::findNonZero(im, locations);
for (int nzi = 0; nzi < locations.size(); nzi++)
{
unsigned char* pixel = static_cast<unsigned char*>(vesselVolume->GetScalarPointer(locations[nzi].x, locations[nzi].y, z));
pixel[0] = 255;
}
}
vtkSmartPointer<vtkDiscreteMarchingCubes> discreteCubes =
vtkSmartPointer<vtkDiscreteMarchingCubes>::New();
discreteCubes->SetInputData(vesselVolume);
discreteCubes->GenerateValues(1, 255, 255);
discreteCubes->ComputeNormalsOn();
vtkSmartPointer<vtkWindowedSincPolyDataFilter> smoother =
vtkSmartPointer<vtkWindowedSincPolyDataFilter>::New();
unsigned int smoothingIterations = 10;
double passBand = 2;
double featureAngle = 360.0;
smoother->SetInputConnection(discreteCubes->GetOutputPort());
smoother->SetNumberOfIterations(smoothingIterations);
smoother->BoundarySmoothingOff();
//smoother->FeatureEdgeSmoothingOff();
smoother->FeatureEdgeSmoothingOn();
smoother->SetFeatureAngle(featureAngle);
smoother->SetPassBand(passBand);
smoother->NonManifoldSmoothingOn();
smoother->BoundarySmoothingOn();
smoother->NormalizeCoordinatesOn();
smoother->Update();
vtkSmartPointer<vtkThreshold> selector =
vtkSmartPointer<vtkThreshold>::New();
selector->SetInputConnection(smoother->GetOutputPort());
selector->SetInputArrayToProcess(0, 0, 0,
vtkDataObject::FIELD_ASSOCIATION_CELLS,
vtkDataSetAttributes::SCALARS);
vtkSmartPointer<vtkMaskFields> scalarsOff =
vtkSmartPointer<vtkMaskFields>::New();
// Strip the scalars from the output
scalarsOff->SetInputConnection(selector->GetOutputPort());
scalarsOff->CopyAttributeOff(vtkMaskFields::POINT_DATA,
vtkDataSetAttributes::SCALARS);
scalarsOff->CopyAttributeOff(vtkMaskFields::CELL_DATA,
vtkDataSetAttributes::SCALARS);
vtkSmartPointer<vtkGeometryFilter> geometry =
vtkSmartPointer<vtkGeometryFilter>::New();
geometry->SetInputConnection(scalarsOff->GetOutputPort());
geometry->Update();
vtkSmartPointer<vtkPolyDataMapper> mapper =
vtkSmartPointer<vtkPolyDataMapper>::New();
mapper->SetInputConnection(geometry->GetOutputPort());
mapper->ScalarVisibilityOff();
mapper->Update();
vtkSmartPointer<vtkRenderWindow> renderWindow =
vtkSmartPointer<vtkRenderWindow>::New();
vtkSmartPointer<vtkRenderWindowInteractor> renderWindowInteractor =
vtkSmartPointer<vtkRenderWindowInteractor>::New();
renderWindowInteractor->SetRenderWindow(renderWindow);
vtkSmartPointer<vtkRenderer> renderer =
vtkSmartPointer<vtkRenderer>::New();
renderWindow->AddRenderer(renderer);
renderer->SetBackground(.2, .3, .4);
vtkSmartPointer<vtkActor> actor =
vtkSmartPointer<vtkActor>::New();
actor->SetMapper(mapper);
renderer->AddActor(actor);
renderer->ResetCamera();
renderWindow->Render();
renderWindowInteractor->Start();
Да, я подумал об этом, и это, в конечном счете, конвейер, в котором я, возможно, последую. Тем не менее, я хотел запустить это так, как он есть, потому что он показывает траекторию ультразвукового зонда. Это связано с тем, что в дополнение к дрожанию/дрожанию рук судно может также подвергаться значительным движениям из-за избиения/деформации и т. Д. Итак, есть ли другой способ лучше приблизить поверхность траектории зонда? – Eagle
Что вы можете пожелать - это отслеживать ваш зонд. Плюс это библиотека с открытым исходным кодом: https://app.assembla.com/spaces/plus/wiki/Home –
Спасибо. Я знаю о библиотеке PLUS. В конце концов я сделал жесткую/нежесткую привязку на отмеченном изображении, применил то же преобразование к исходным фреймам США и сделал оба тома. – Eagle