3
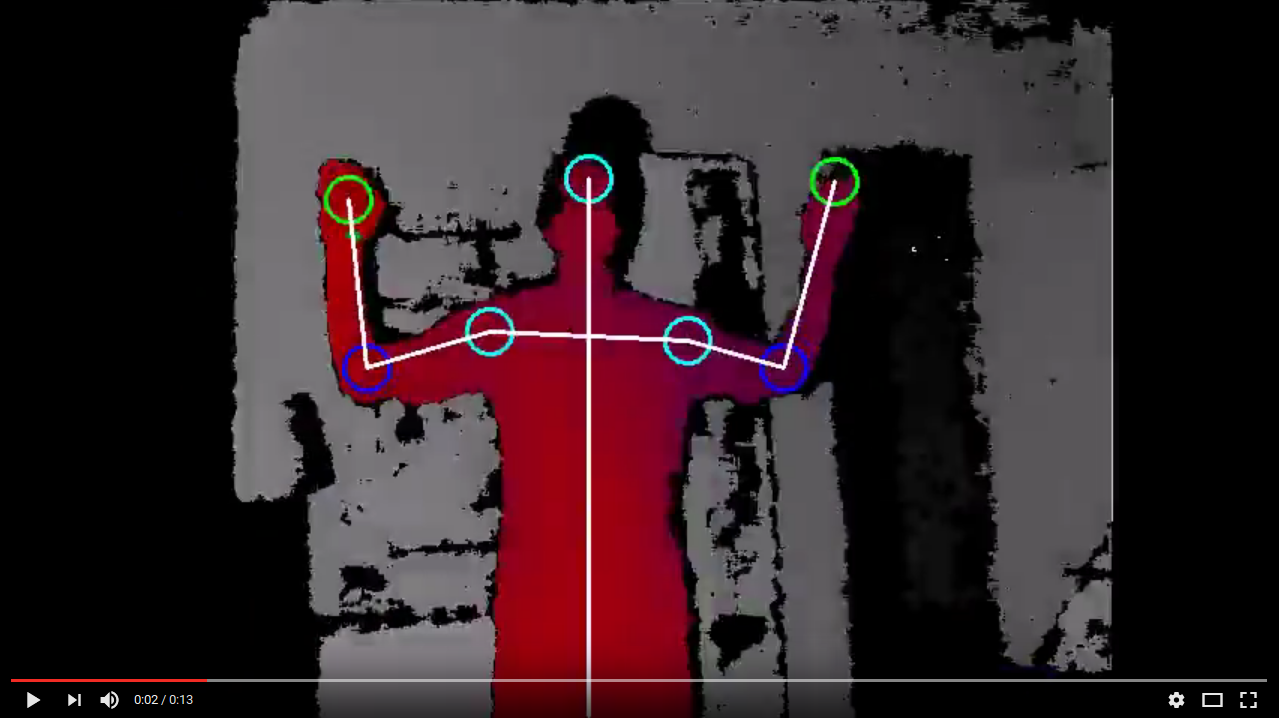
Чтобы создать робота-последователя, я использую ASUS Xtion и OpenNI. Для получения изображений RGB и скелетов я использую сценарий отслеживания скелета (https://github.com/Chaos84/skeleton_tracker). Tracker публикует суставы в «/ tf» Но дело в том, что я не могу использовать эти совместные координаты в своем сценарии. Я не знаю, как получить к ним доступ. Как я могу получить доступ к ним и использовать их в своем сценарии, чтобы заставить робота двигаться в соответствии с этими координатами? Спасибо.Как получить доступ и использовать координаты скелета с помощью OpenNI, ASUS Xtion и ROS?
Благодарим вас за ответ. Фактически, я посмотрел, прежде чем я разместил, но имена сигналов были разными, чем документ, который они объясняют. После того, как я найду правильные имена для них, я смог бы выполнить это, используя метод в ссылке, которую вы даете. Благодаря! – Gokay